Monitor de visualização SBS SM-3
Com o SBS SM-2 Seeing Monitor também pode agora analisar a qualidade do Seeing do seu observatório.
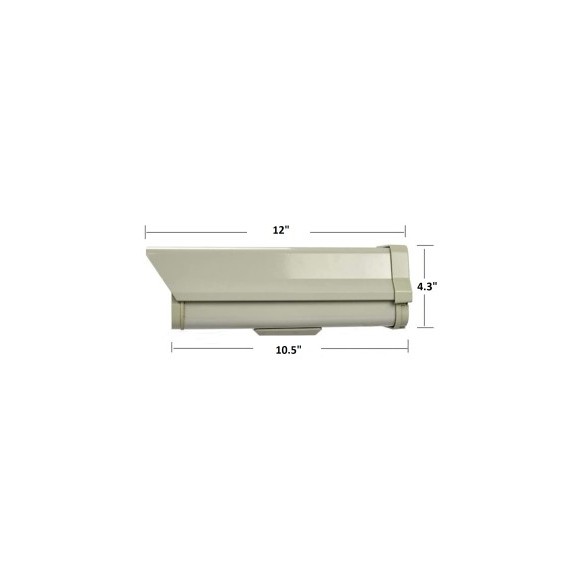
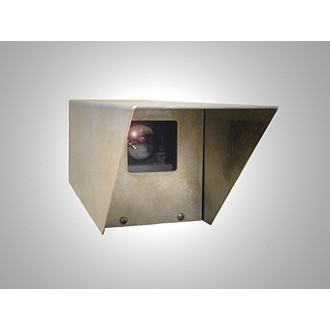
O Monitor de Visão SM-3 da SBS utiliza um sensor CMOS QHY de alto QE e baixo ruído e uma lente 100 mm f/3,5 de alta qualidade, bem como um software personalizado do Monitor de Visão escrito pelo Dr. Alan Holmes. O Seeing Monitor monitoriza constantemente a visão durante um período de 12 horas e apresenta a medição no monitor do computador, registando os dados num ficheiro de texto para análise posterior. A câmara é montada numa caixa de alumínio à prova de intempéries com uma janela de qualidade óptica para a proteger dos elementos. Uma vez retirada a tampa, a câmara pode ser focada e o apontamento pode ser ajustado de forma independente. A interface do computador é USB2. Existe espaço para instalar um extensor USB alimentado na caixa de alumínio, por baixo ou por trás da câmara.
Detalhes do SM-3
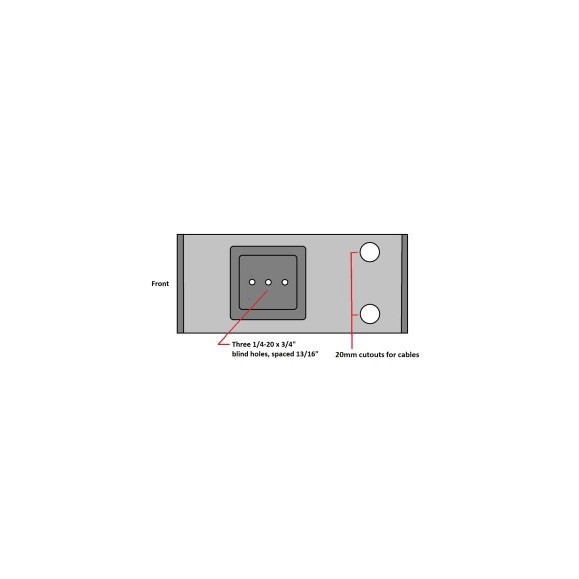
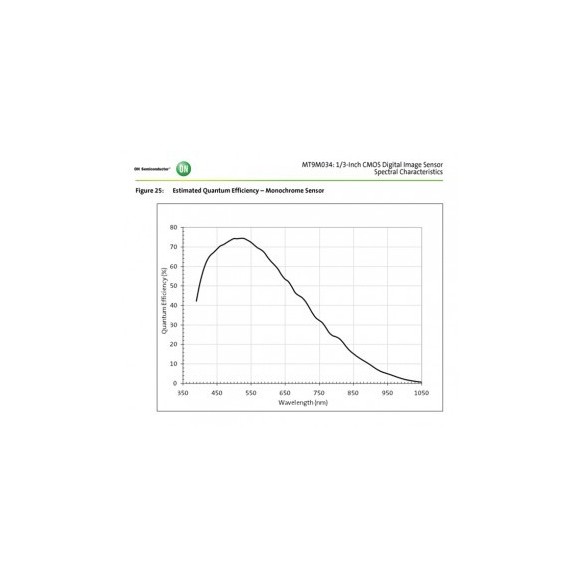
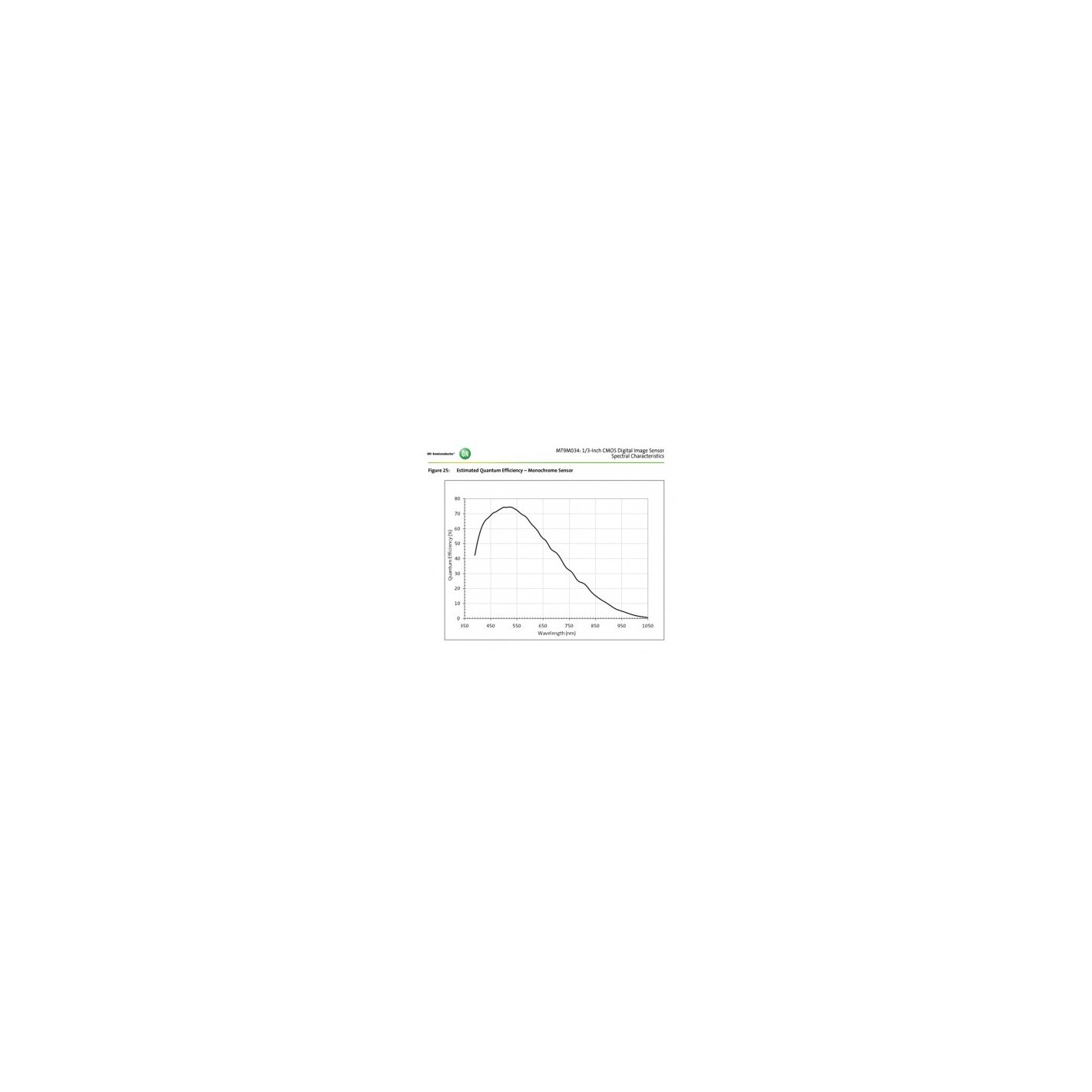
O monitor de visão SM-3 é essencialmente o mesmo que o anterior SM-2, excepto no que se refere à nova caixa, a pequenas alterações nos ajustes de montagem interna da câmara alt az e à configuração do orifício de montagem inferior. De resto, o seu funcionamento é idêntico ao do SM-2. O SM-3 continua a utilizar a câmara QHY 5L-II, um CMOS MT9M034 de 1,2 megapixéis com um QE excepcionalmente elevado (74%) e um ruído de leitura excepcionalmente baixo (~5e-). A função de calibração FPN (Fixed Pattern Noise) no chip do sensor resolve um dos principais problemas da tecnologia CMOS, resultando em imagens nítidas e uniformes, mesmo com um ganho elevado. A objectiva é uma objectiva de montagem em C de 100 mm f/3,5 de alta qualidade fabricada no Japão, ideal para esta aplicação.
O monitor de visão SM-3 é particularmente útil para quem tem uma instalação permanente, mas também para quem tem de se preparar todas as noites para obter imagens astro. Ao registar e traçar a visão de noite para noite e de hora para hora, o utilizador pode determinar a altura ideal para tentar obter imagens de alta resolução e as alturas em que talvez seja aconselhável um equipamento mais adequado para imagens de campo amplo e de baixa resolução. O Seeing Monitor integra o hardware necessário numa caixa à prova de intempéries e inclui software personalizado. A visibilidade é apresentada em unidades da meia largura zenital máxima (FWHM) em segundos de arco esperada para uma imagem estelar de longa exposição.

Teoria de funcionamento
A maioria dos observatórios profissionais utiliza a técnica do Monitor de Movimento de Imagem Diferencial (DIMM) para medir a visão. Esta técnica é implementada em hardware utilizando uma máscara de dois orifícios sobre a abertura de um telescópio Schmidt-Cassegrain de 8 a 11 polegadas e medindo a flutuação da raiz quadrada média (rms) do espaçamento dos dois pontos observados quando uma estrela brilhante é fotografada ligeiramente desfocada com uma câmara rápida. A razão para medir dois pontos é que o movimento agregado dos dois pontos devido a um mau seguimento ou à vibração do vento pode ser rejeitado. No entanto, o sistema resultante é complicado de automatizar e, invariavelmente, também requer uma caixa automatizada para alojar o telescópio, elevando o custo total para muitos milhares de dólares. Um dos problemas desta abordagem é o facto de ignorar completamente as correntes do tubo no SCT, que não são pequenas nem estão correlacionadas ao longo da abertura. A abordagem usada com o Monitor de Visão SBS é usar um sistema fixo de abertura única olhando para Polaris, montado numa mola sólida e pesada. Isto elimina o movimento do vento e o erro de seguimento. A Polaris move-se através do espaço de uma medição, pelo que o desvio linear do centróide da posição da Polaris é determinado e corrigido. Chamamos a isto a técnica SIMM.
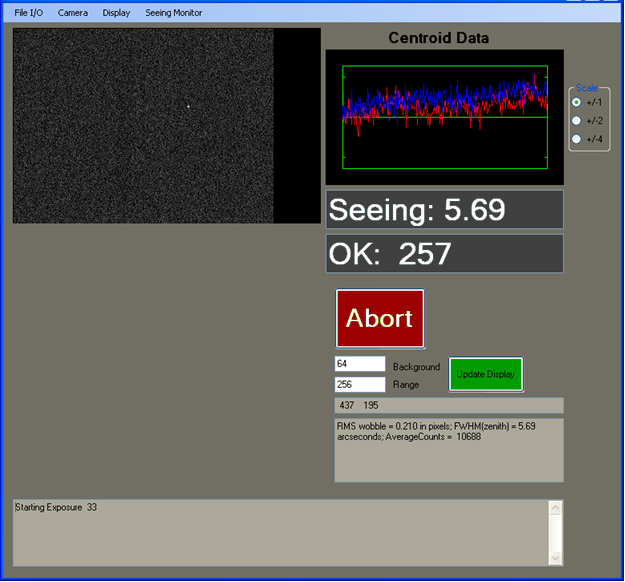
Uma medição precisa da visão requer exposições de 0,01 segundos ou mais rápidas para congelar a visão e evitar erros devido à média do movimento da estrela durante uma longa exposição. No caso do SM-2, o software recolhe 256 quadros de observação, cada um com uma exposição de 0,01 segundos. O movimento rms da imagem é então determinado. A recolha e o processamento de 256 fotogramas demoram cerca de um minuto. Uma lente de alta qualidade (Fig. 1, acima) com uma distância focal de 100 mm permite obter uma precisão sub-pixel com o cálculo do centróide, e o movimento da Polaris ao longo de uma noite pode ser contido no sensor CMOS com uma distância focal de 100 mm. Ao longo de uma noite, a Polaris pode mover-se num arco de 180 graus, pelo que o seu movimento deve ser tido em conta em qualquer plano de seguimento a longo prazo.
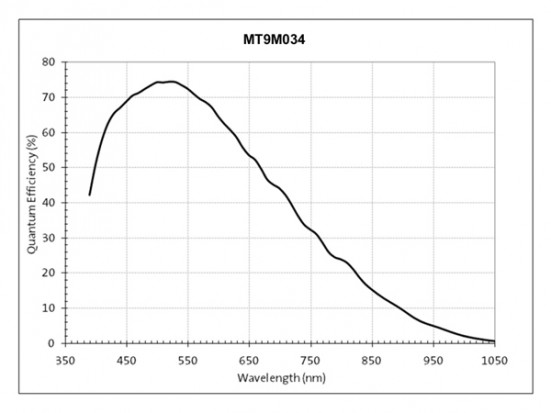

Figura dois: Duas exposições somadas do campo Polaris
Na latitude de Santa Barbara, Califórnia (35 graus), o ruído de fundo de um SM-3 com uma lente de 100 mm é de cerca de 0,6 segundos de arco FWHM. Este valor é medido em ambientes fechados à noite, observando um LED de brilho comparável ao de Polaris, sendo conduzido lentamente na direcção horizontal. Compreenda que este valor baixo adicionará um sentido rms à visão real em níveis baixos. Assim, se um SM-3 com uma lente de 100 mm medir uma visão de 1,0 segundos de arco, subtrair o desvio medido de 0,6 segundos (em sentido rms) para obter a visão real, 0,8 segundos de arco. A conversão da visão medida à altitude de Polaris para um valor zenital é feita utilizando uma fórmula bem aceite, em que a visão zenital é igual à visão medida para Polaris dividida pela massa de ar à potência de 0,6. A massa de ar é igual a 1 dividido pela massa de ar à potência de 0,6. A massa de ar é igual a 1 dividido pela massa de ar à potência de 0,6. A massa de ar é igual a 1 dividido pelo cosseno da quantidade de 90 graus menos a latitude.
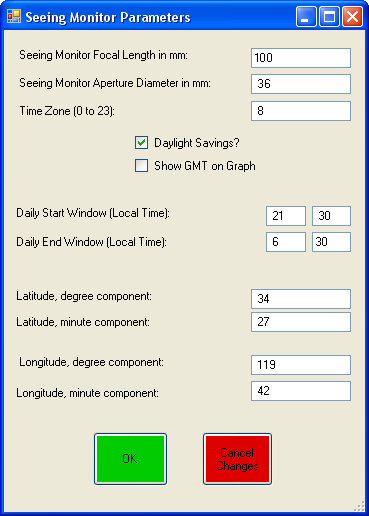
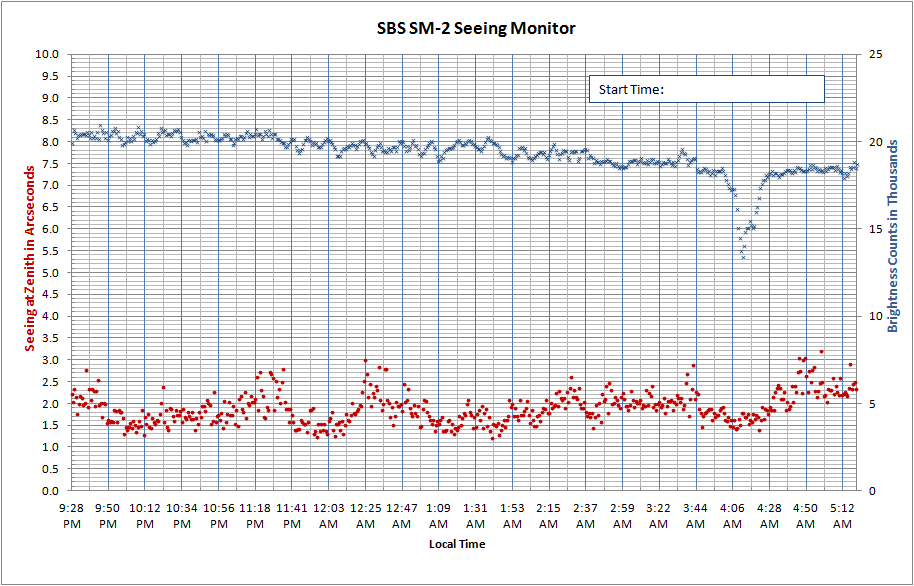
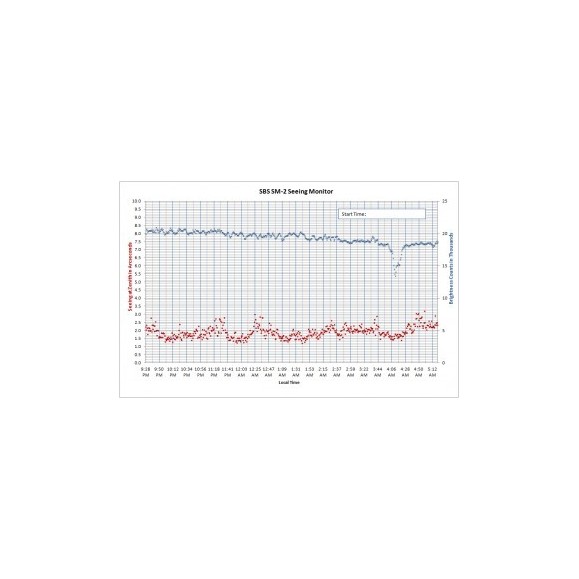
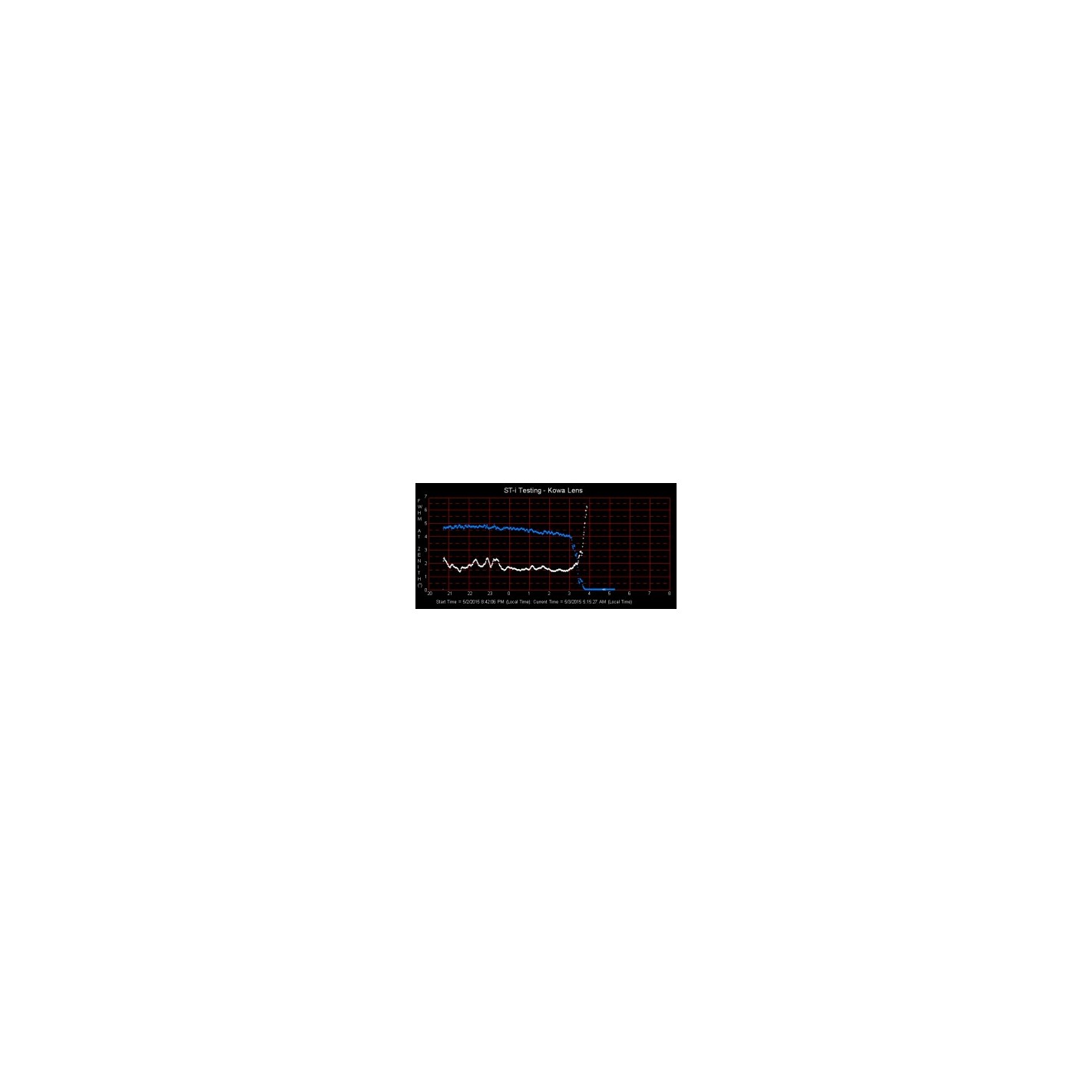
Menu Monitor de visão: Aqui pode optar por iniciar imediatamente o registo de visão. Se pretender iniciar a uma hora específica, seleccione Timed Based (Baseado no Tempo) e o programa será executado durante o período indicado. Quando o registo começa, aparece um gráfico que mostra o zénite FWHM (metade da largura máxima da imagem da estrela), com uma hora de início que é o número da hora anterior e que mostra 12 horas de dados. A duração deste gráfico está definida para 12 horas. O gráfico e um ficheiro de texto que regista os dados de observação serão escritos no directório C:SeeingMonitor a cada 5 minutos. O nome do gráfico de observação nunca muda, por isso pode ter um programa externo a monitorizar esta pasta e colocar o ficheiro num website, se assim o desejar. O nome do ficheiro de dados registados é sempre o mesmo se começar a registar imediatamente, e irá substituir o ficheiro da noite anterior, por isso deve renomear manualmente o ficheiro de texto da noite anterior se o quiser guardar. Em caso de funcionamento em modo de várias noites com início e fim programados, o nome do ficheiro é personalizado com a data, pelo que os dados da noite anterior não serão substituídos. O gráfico do ecrã é sempre substituído.
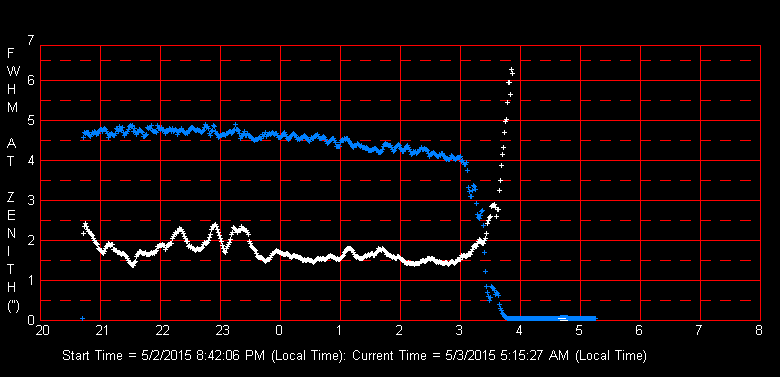
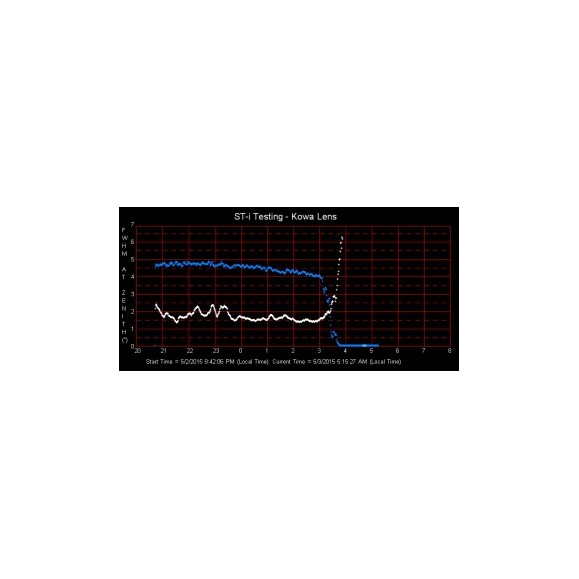
No gráfico da figura 5, acima, os pontos de dados brancos registam o número de observações em segundos de arco. Os pontos de dados azuis representam o brilho polar no momento de cada medição. Pode ver-se no gráfico que, nesta noite, a visibilidade começou a deteriorar-se por volta das 3:00 da manhã e piorou rapidamente durante os 45 minutos seguintes, até ser inútil obter imagens. O brilho de Polaris também começou a deteriorar-se ao mesmo tempo, indicando a presença de nuvens ou nevoeiro. Mesmo com uma amostragem de 100 vezes por segundo, quando a visibilidade é REALMENTE má, o monitor de visibilidade provavelmente subestima a gravidade da situação, uma vez que a imagem é apenas uma mancha a ferver. Embora o monitor de visibilidade subestime estas noites terríveis, fornece uma indicação clara de que seria melhor fazer outra coisa que não astro-imagens nessa noite. A utilidade do monitor de visibilidade é mostrada na figura abaixo. Trata-se de uma animação de 13 gráficos obtidos durante um período de duas semanas. Como se pode ver, a visibilidade e os padrões de boa e má visibilidade por noite variam muito, tornando quase impossível confiar no histórico ou na experiência para prever quando a noite valerá ou não o esforço de uma hora de exposição.
Monitor de visualização SBS SM-3

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}